

Specifications:
| Weight Class: Fairy (150g wheeled, 225g shuffler, 300g walker) | |
| Type: 6-Legged Shuffler | |
| Drive: Two hacked HS-303 servos | |
| Drive power: 5x 1.2v NmH 380mAh N-cells | |
| Primary Weapon: Lifter | |
| Weapon Power: HS-81 Micro servo | |
| Radio/Frequency: Hitec 8ch Super/75mHz Channel 90 |
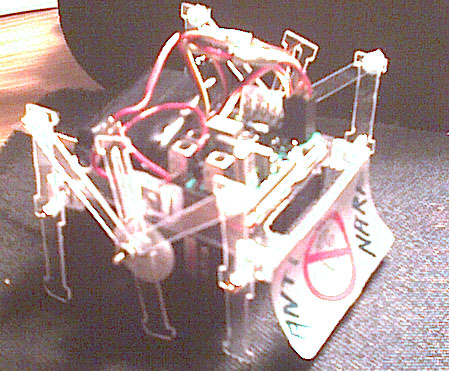
Inspired by fellow builder, Eric Scott of Team Nar, this little bot started off as a demo for a high school AP Physics class. After the start of building, I soon realized it actually had potential. It's original version, built quite hastily, was the first time I had actually experimented with non-wheeled robots.
After primary completion, I had myself a shuffling chassis. I worked with it to fix bugs over the period of a day or two. Later, I purchased several items to make the bot more final. I replaced most of the hardware with nylon hardware. There were brass spacers used on the legs, that were also replaced with nylon spacers. I removed weight from the base, and mounted the lifter on the front. Another adition was the light-duty skirt on the back. This hypothetically will limit the vulnerability of the bot's rear. As you can see, it reduces the 1.5" of clearance to about .25".
It will be making it's first appearance at the Gear Heads book-signing taking place at the Prudential Center, on March 20. There will be a few other fairies going, maybe we'll have a bit of a rumble.......